
Projekt SySBOT (Symulacja i Sterowanie Bezzałogowego Obiektu Typu Tiltrotor) był Indywidualnym Grantem Badawczym finansowanym przez Firmę Lockheed Martin, realizowanym na naszym wydziale przez Jakuba Polaczka przez okres 6 miesięcy.
Głównym celem projektu było opracowanie i stworzenie algorytmu sterowania (stabilizacji kątów orientacji przestrzennej) dla małego bezzałogowego tiltrotora. Tiltrotory są statkami powietrznymi pionowego startu i lądowania z możliwością rekonfiguracji w locie, charakterystyczne dla nich są obracane gondole silników pozwalające na zmianę konfiguracji w locie. Bardzo znaną konstrukcją tego typu jest amerykański V-22 „Osprey” (Rybołów), który swojej przydatności dowiódł podczas służby w Piechocie Morskiej oraz Siłach Powietrznych USA uczestnicząc m.in. w misjach w Iraku, Kuwejcie czy Afganistanie.

V-22 Osprey
Poprzez uwspólnienie silników do zawisu i lotu postępowego konstrukcje typu tiltrotor cechują się znacznym zasięgiem, wysoką prędkością przelotową oraz długotrwałością lotu przy jednoczesnym zachowaniu możliwości pionowego startu, lądowania i zawisu. Własności takie są szczególnie pożądane w bezzałogowych statkach powietrznych, gdzie pozwalają na nowe zastosowania w dziedzinach mapowania, obserwacji czy transportu.
Zadania projektu SySBOT podzielone zostały na trzy grupy zajmujące się oddzielnymi zagadnieniami związanymi z rozwojem algorytmów sterowania.
- Symulacja – stworzenie modelu symulacyjnego rozważanej konfiguracji
- Sterowanie – opracowanie algorytmów sterowania tiltrotora
- Demonstracja – projekt i wykonanie modelu bezzałogowego tiltrotora

Rozważana konfiguracja tiltrotora
Konfiguracja tiltrotora rozważana w projekcie SysBOT charakteryzuje się uproszczoną konstrukcją wirników nośnych. Zastosowane zostały wentylatory EDF dla zmniejszenia poziomu wibracji oraz bezpieczeństwa. Wentylatory takie, w przeciwieństwie do wirników stosowanych w pełnowymiarowych tiltrotorach nie posiadają sterowania kątem natarcia łopat. Zmniejsza to koszt wykonania i wpływa pozytywnie na niezawodność rozwiązania, zwiększa jednak wymagania stawiane przed algorytmem sterowania.
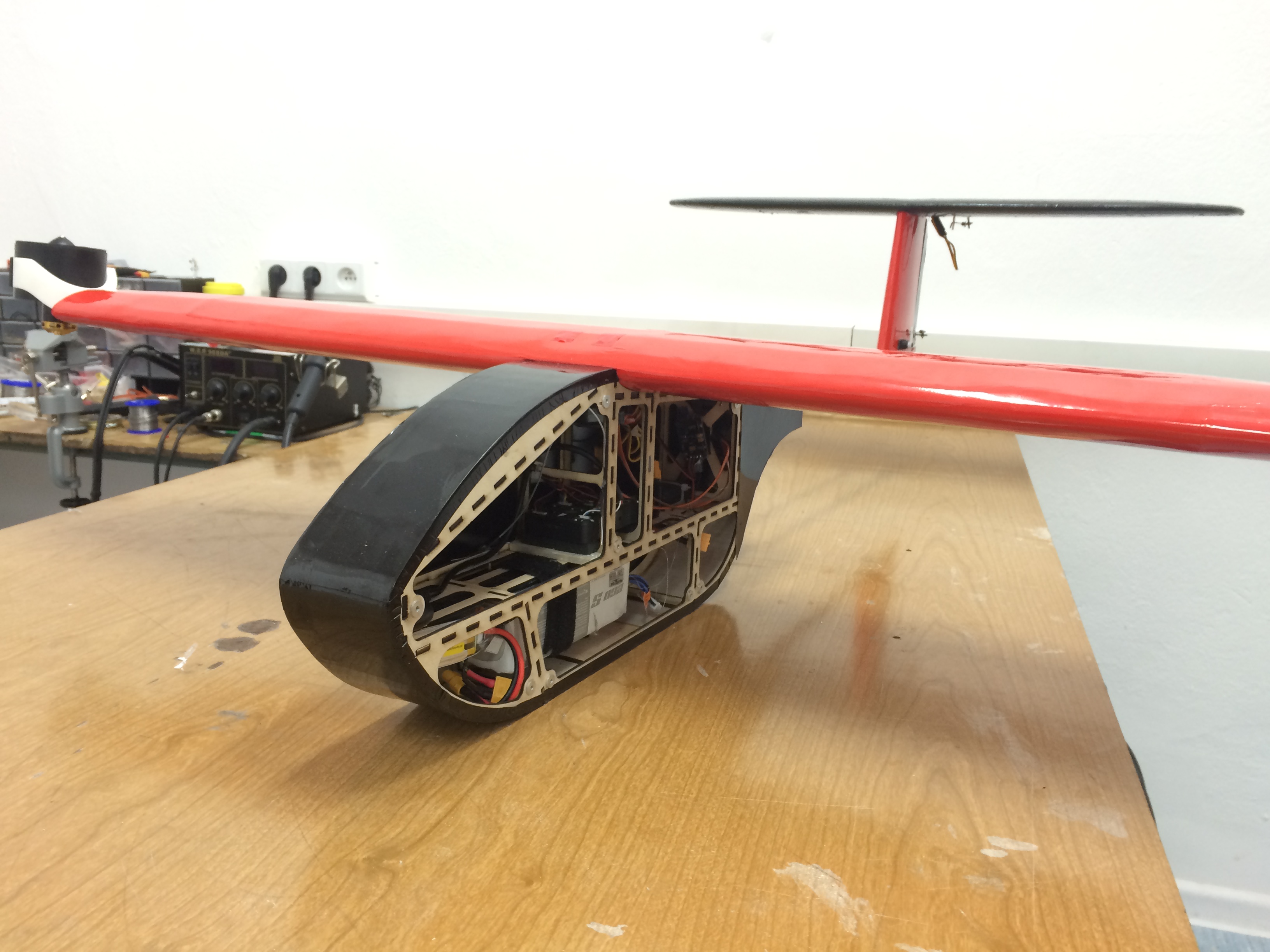
Tiltrotor opracowany w ramach projektu