
[wptab name=’Opis’]Jakiś czas temu, grupa zapalonych studentów – elektroników w MelAvio rozpoczęła projekt własnego systemu autopilota o nazwie kodowej RAF Pilot. Projekt miał na celu przećwiczenie zdobytej na zajęciach wiedzy i jej poszerzenie. W ciągu miesiąca powstał pełny hardware oparty o 2 mikrokontrolery AVR Atmega. Wraz z niedużym układem IMU obejmującym żyroskop, akcelerometr, magnetometr oraz czujniki ciśnienia RAF Pilot był w stanie automatycznie sterować modelem samolotu RC po zadanych punktach.
W ramach tego projektu zostało również rozwinięte oprogramowanie do stacji naziemnej nazwane RAF Base.
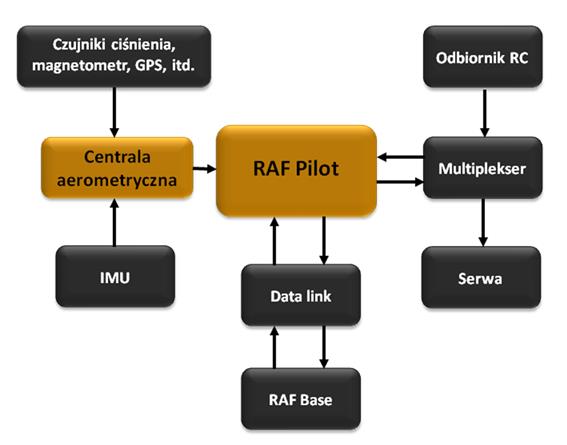
Architektura RAF Pilot v1 została przedstawiona poniżej:
[/wptab][wptab name=’Specyfikacja’]
Czujniki:
- 5 Hz GPS (wspieranie DGPS)
- Zintegrowane czujniki położenia o 10 stopniach swobody (akcelerometr, żyroskop, magnetometr, wysokościomierz oparty o ciśnienie)
- Czujnik ciśnienia statycznego i dynamicznego.
- Monitorowanie 4 napięć analogowych
- Łatwo rozszerzalna architektura
Dane techniczne:
- Niezależny przełącznik RC (multiplekser) z osobnych źródłem zasilania (pozwala na zdalne sterowanie samolotu w przypadku awarii autopilota)
- Trzy osobne mikrokontrolery na pokładzie (Centrala Aerometryczna, RAF Pilot oraz multiplekser)
- Zewnętrzne porty rozszerzające (3 niezależne USARTy, 2x I2C w standardzie 3.3V, 2x SPI w standardzie 5V, 20 wejść analogowych oraz 20 uniwersalnych portów wejścia/wyjścia, USART dla GPS w standardzie 1.8V)
- Zasilanie 5V lub 7-12V
- Wyjścia zasilające 5V, 3.3V oraz 1.8V do 1A
- ISP (In-System-Programming – możliwość programowania w systemie)
- Współpracuje z data linkami 5 I 3.3V
- odświeżanie stacji naziemnej 8Hz
- 6 wyjść na serwa PWM
- 8 wejść PWM
Możliwości:
- Lot po punktach nawigacyjnych z utrzymywaniem prędkości i wysokości
- W pełni zintegrowane oprogramowanie stacji naziemnej (RAF Base)
- Wzmocnienia dostosowywane ‘na żywo’
- Punkty nawigacyjne dostosowywane ‘na żywo’
- Planowanie trasy za pomocą myszki
- Śledzenie ‘na żywo’
- Wyczerpujące logowanie danych po stronie PC
- Mały i lekki
[/wptab][wptab name=’Galeria’]
[/wptab][end_wptabset]